

Le programme de contrôle de la maquette commence à porter ses fruits
Il est loin d’être terminé, mais étape par étape, il sera complété, et aura finalement la gestion totale de la maquette.
Pendant que le pupitre qui accueillera tous les boutons de contrôle est en cours d’impression sur l’imprimante 3D (un article arrivera à ce sujet), j’en profite pour faire des tests avec le programme envoyé dans l’Arduino.
Pour contrôler le déplacement des locomotives, j’ai d’abord utilisé un transistor, qui faisait varier la tension de sortie en fonction du signal que l’arduino lui transmettait. Mais cette solution n’est pas optimale, et nécessite deux relais pour permettre l’inversion du sens de circulation.
Aussi, j’utilise une puce électronique optimale pour la gestion des moteurs. Bien que ce soient les rails qui soient alimentés par la puce, ils alimentent à leur tour les moteurs des locomotives.
La puce a pleinement son intérêt, donc. Il s’agit du modele L293DNE.
Elle est cablée à l’arduino de la façon suivante:
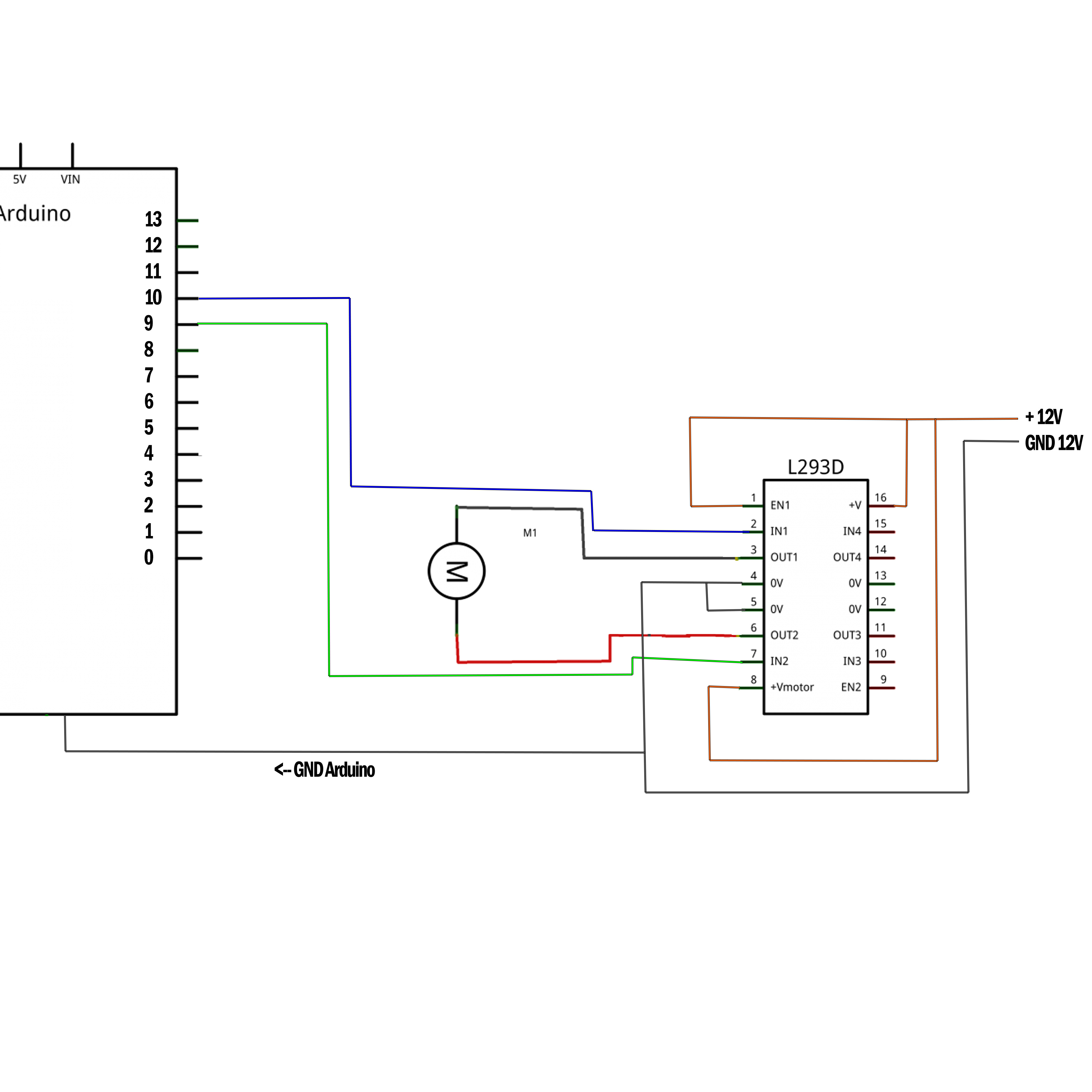
En lui envoyant deux signaux différents, on peut donner les ordres à la puce de circulation dans un sens, dans l’autre, accélérer, ou ralentir. Pour les besoins de test, j’en ai profité pour ajouter un écran, donnant des informations intéressantes sur l’état des locomotives. Cet écran sera incorporé au pupitre.